Interface Task¶
The interface task allows a user to control the robot. It’s main functions are to allow the user to print a circle, line, custom image, or letters (typed by the user). The finite state diagram is below.
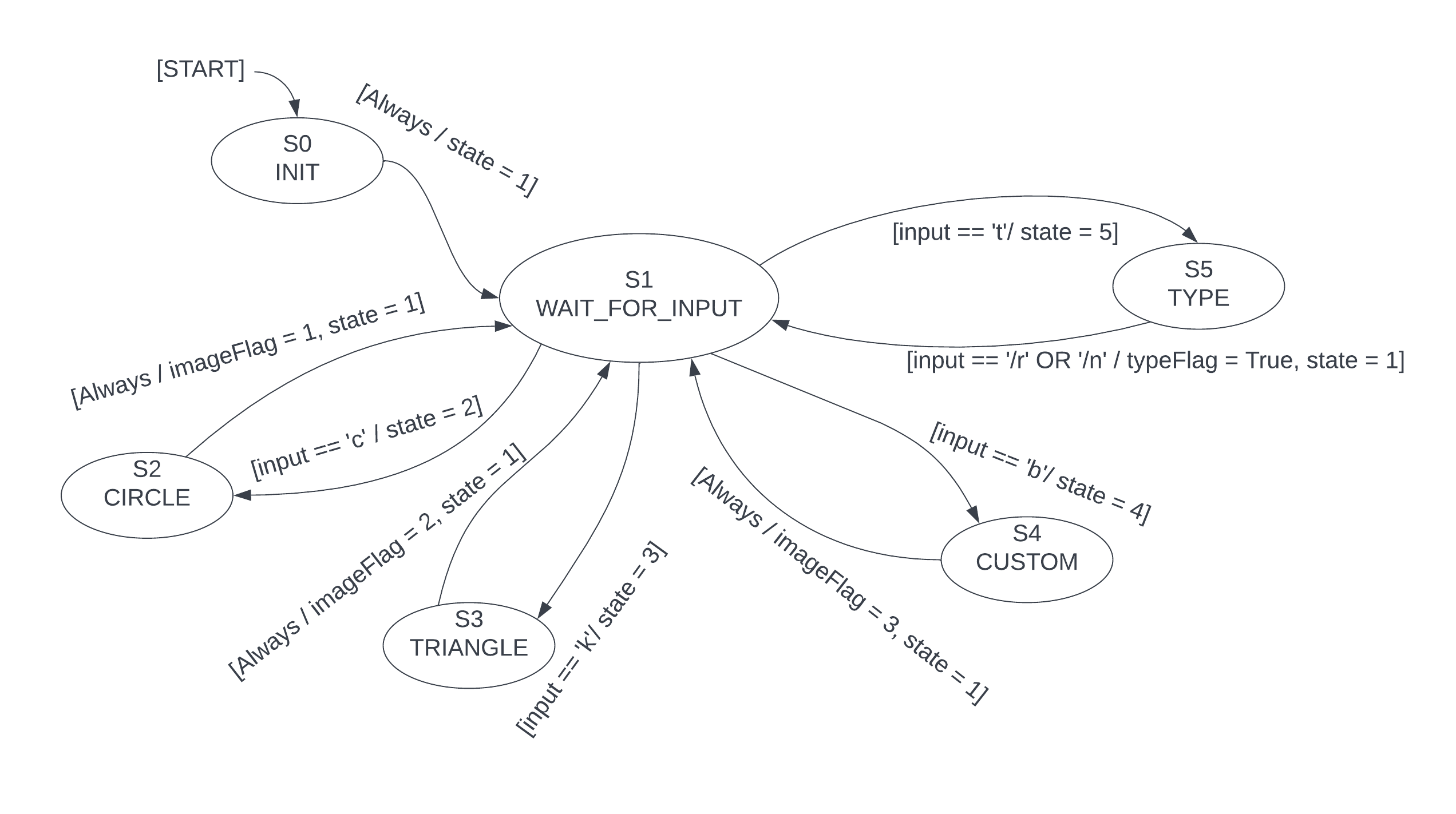
State 0: INIT - Prints the available user actions:
Draw a circle
Draw a triangle
Draw a custom image
Accept and write a user input
State 1: WAIT_FOR_INPUT - Waits for the user to input their selection. This is a non-blocking replacement for the ‘input’ python method.
State 2: CIRCLE - Sets the ‘image’ shared variable to 1. This is read later by the Data Task to select which image to draw.
State 3: TRIANGLE - Sets the ‘image’ shared variable to 2. This is read later by the Data Task to select which image to draw.
State 4: CUSTOM - Sets the ‘image’ shared variable to 3. This is read later by the Data Task to select which image to draw.
State 5: TYPE - Allows the user to type words to be written. Once a space is entered, the preceding chunk is saved as a word. Once a return is entered, a shared variable is changed to True to trigger the writing task.