Overview¶
The goal of the project was to create a robot which could draw images in any way. To increase the challenge, we were not allowed to use cartesian coordinates. Polar coordinates were a popular choice, but many other configurations emerged from our classmates. Our design consists of two variable radii, intersecting at the end.
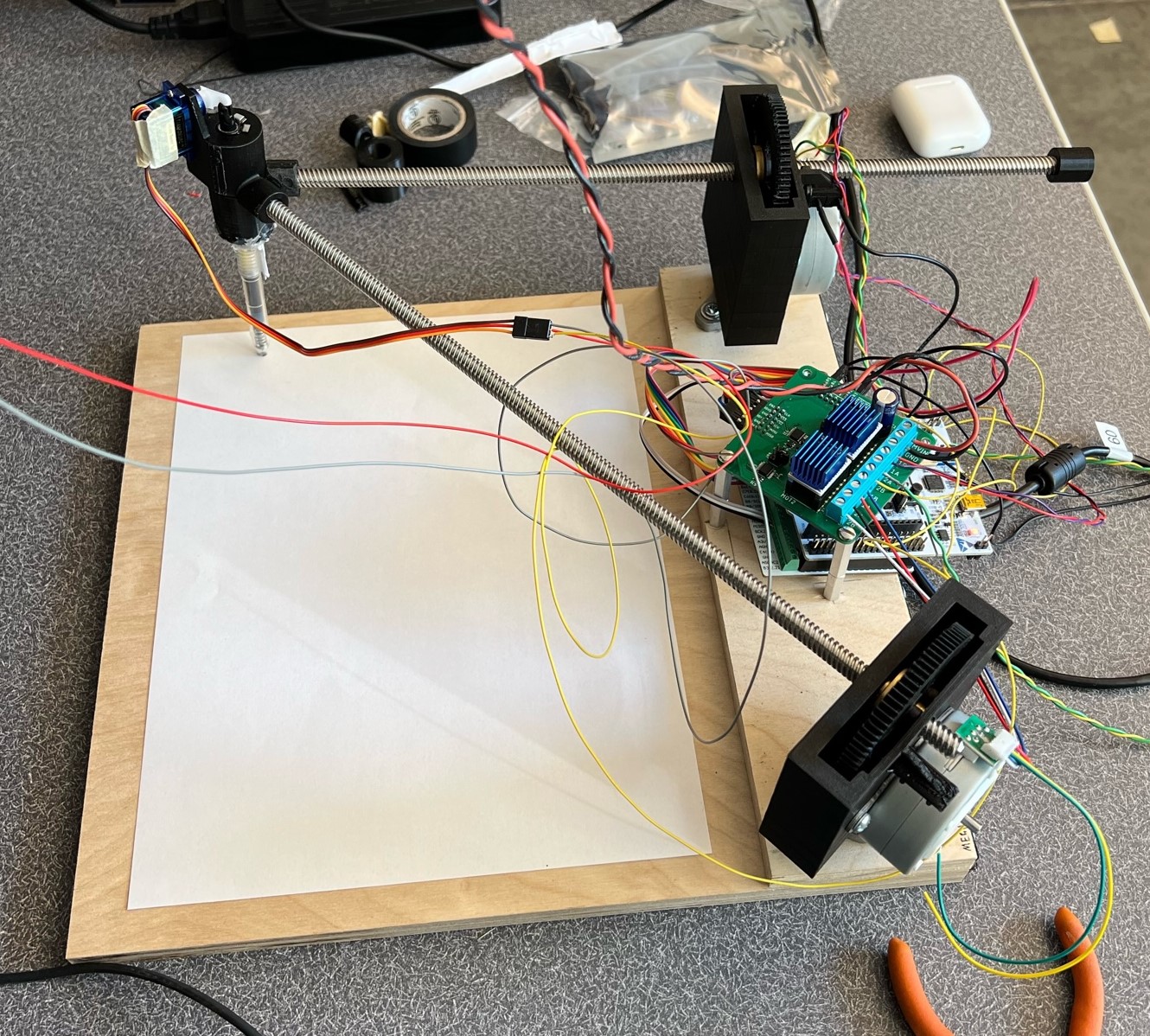
The video below shows the function of the device.
Below are some of the robots’s drawings compared to the original files.
An interesting feature of this robot is the ability to write words typed by the user. More detail can be found in the Type Task.